小行星是绕太阳公转的小的岩石体,太小而不能称为行星。太阳系中有数百万颗小行星,大小,形状和组成不等。
对小行星的探索可以帮助发现有关太阳系,地球和生命本身的有趣信息。
小行星还可以充当行星科学,资源开采,通信中继或行星防御的战略要地。然而,到目前为止,由于小行星的低重力场和高度非线性重力场,探索小行星的表面已被证明是非常具有挑战性的。
Hayabusa II和OSIRIS-Rex等最近的小行星飞行任务只是飞越或即触即走行动。因此,研究人员一直在尝试开发能够探索小行星表面的技术,例如,使用原位仪器分析其成分和地下材料。
跳跃机器人对于探索此类表面可能特别有用,因为在不规则重力场的情况下,通过弹道跳跃的机动性具有多个优势。
这些类型的机器人可以在崎rough的地形上穿越很长的距离,而能源消耗却有限。亚利桑那大学的一组研究人员最近开发了弹道跳跃动力学和小行星表面运动计划的新方法。
使用3D点云扫描匹配进行自我定位。“与地球不同,小行星重力较低,因为这种跳跃漫游车更适合,因为它们可以用很少的能量就可以在任意崎rough的地形上穿越很长的距离,”进行这项研究的研究人员之一Himangshu Kalita告诉TechXplore 。“
但是,它们的不规则形状会导致高度不规则的重力场,从而使跳跃变得高度不确定。因此,需要用于跳跃漫游者自治的顺序体系结构,该体系结构可以在执行任何跳跃之前预先计划并同时进行自身定位。”
Kalita和他的同事Jekan Thanga设计的方法计算出拦截目标所需的速度,然后定位跳跃机器人。为了定位机器人,研究人员采用了基于姿势的估计方法,这些方法基于使用3D激光扫描仪的连续扫描匹配。
收集的信息随后用于计划跳跃机器人在目标小行星表面上的运动。机器人需要执行多次跳跃才能到达小行星上的所需位置,同时还要避开障碍物。
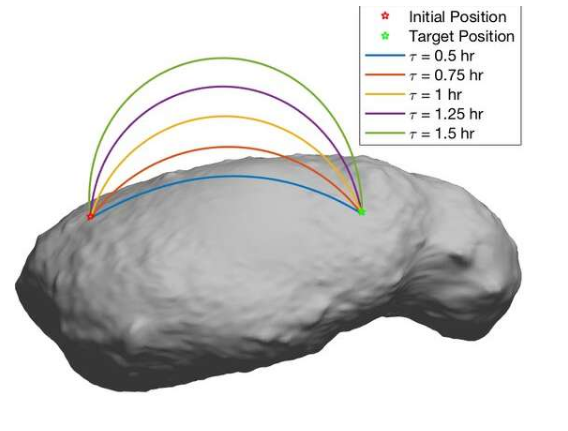
使用进化算法的优化路径规划器的示意图。Kalita解释说:“本文讨论的运动计划架构可以为跳跃式漫游器从其最初位置在小行星表面上的初始位置找到接近最佳轨道的目标位置,”
“我们的方法使用高保真动力学模型在候选机动模拟中执行试验和错误评估,以确定其适用性。试验和错误评估考虑了风险,回报和局部不确定性。”
许多小行星资源丰富,例如水,碳化合物,铁和铂族金属。一些小行星还包含现有行星的遗迹,因此可以用作“时间舱”,提供了此类行星的早期地质和地理历史的原始记录。
探索这些小行星可以提供有关太阳系及其行星的起源的宝贵见解。将来,Thanga和Kalita设计的方法可能为小行星表面的探索铺平道路,从而带来有趣的观察和发现。
汤加说:“对小行星的飞掠和远距离观测不足以确定小行星顶层之下的物质。” “我们的方法需要对小行星进行表面弹道跳跃,可以回答这些问题。
此外,迄今为止,部署在小行星表面上的漫游车依靠母舰进行定位,但很少遇到。我们的模拟显示,通过使用车上装有3D映射传感器,漫游者可以执行与母舰无关的自我定位,这是漫游者自治的先决条件。”
由Thanga和Kalita设计的方法旨在有效地规划跳跃机器人在具有不规则重力场的小行星表面上的长距离运动。
同样的方法可应用于多个协同的机器人,同时探索给定的小行星的表面。研究人员还扩展了他们的方法,以便计算几个最佳轨迹,这将使机器人在访问多个航路点时可以达到期望的目标。
Kalita说:“我们现在正在开发用于小型跳跃漫游车的原型,它将使用基于升华的推进剂进行跳跃。” 利用模拟的不规则重力场,我们将能够测试找到跳跃轨迹的方法。”