
来自斯图加特马克斯·普朗克智能系统研究所(MPI-IS)的一组科学家发明了微型微型机器人,该微型机器人类似于穿越循环系统的白细胞。
它具有白细胞的形状,大小和移动能力,并且可能会彻底改变疾病的微创治疗方法。
该团队在实验室环境中模拟了血管,成功地在这种动态而密集的环境中磁力操纵了微辊。
球形药物运送工具抵御了模拟的血流,进一步推动了靶向药物运送的发展:在体内,没有比循环系统更好的通向所有组织和器官的途径。
它跨越每个单元,提供了理想的导航路线。该研究项目于5月20日在《科学机器人》上发表,标题为“用于在生理血流中靶向药物输送的多功能表面微辊”。
研究小组从免疫系统的白细胞中汲取了灵感,因为白细胞是血液中唯一的运动细胞。
在巡逻到病原体入侵的地方时,它们沿着血管壁滚动,到达故障点时从血管中渗透出来。它们运动的关键主要是由于血管壁处的流速大大降低。
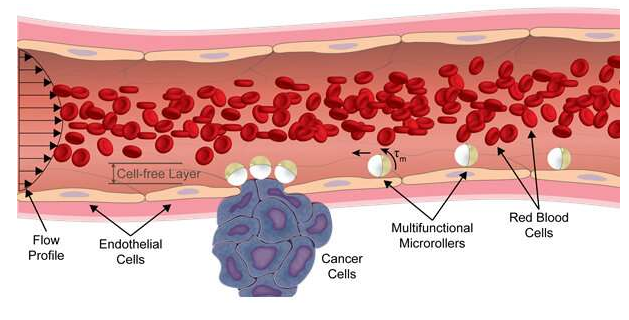
概念示意图描绘了磁致动的微辊在血管壁上逆着血流(上游)运动。
利用相同的现象,科学家们开发了一种微型机器人,由于其磁性,它们可以在生理高速血流条件下主动向前推进并在血管内导航。
“我们的愿景是创造一种用于微创靶向药物输送的下一代载体,这种药物能够以比以前更困难的方式到达人体更深的组织,并且进入途径更加困难,”物理情报部主任Metin Sitti说MPI-IS和出版物的最后作者。
常规疗法在体内存在非特异性药物分布,他进一步阐述,有可能在非靶向器官和组织中引起严重的副作用。
每个微辊的直径均小于8微米,由玻璃微粒制成。一侧覆盖着一层薄薄的镍和金膜,另一侧覆盖着可以识别癌细胞的抗癌药物分子和特定的生物分子。
“利用磁场,我们的微型机器人可以在模拟血管中向上游航行,由于强大的血液流动和密集的细胞环境,这具有挑战性。
当前的微型机器人都无法承受这种水流。此外,我们的机器人可以自主地能够识别诸如癌细胞之类的目标细胞,这要归功于它们表面的细胞特异性抗体涂层。
它们可以在移动中释放药物分子。” Yunus Alapan解释说。
来自小鼠的静态全血中的microroller视频。
在实验室环境中,微滚筒的速度可达每秒600微米-每秒约76体长,代表了在这种规模下最快的磁性微型机器人。
但是,在现实场景中执行此动作之前,需要解决几个挑战。实际上,它们远未在人体中进行测试。在实验室中,该团队能够使用显微镜对机器人进行成像,并使用电磁线圈对其进行操纵。
微型滚筒向弯曲的3D表面顶部爬并推动血流的视频。
“但是,目前诊所中的成像方式的分辨率还不足以对人体内部的单个微型机器人进行成像。
此外,考虑到微型机器人之间的尺寸差异,由单个微型机器人运送的治疗性货物是不够的。 -机器人(大约10微米)和目标组织(数千微米),因此,有必要对一群中的大量微型机器人进行有控制的操纵,以产生足够的效果,但我们仍然远远没有做到这一点, ” Ugur Bozuyuk博士说。
同一部门的学生,并且是研究的共同负责人。这仅仅是开始。
通过移动微型滚筒主动靶向癌细胞的视频。具有HER2抗体的微滚筒在内皮细胞上移动,以附着到人乳腺癌细胞上。
该研究项目的动机可以追溯到诺贝尔奖获得者理查德·费曼(Richard Feynman)的著名演讲“底部有足够的空间”。
在他的演讲中,物理学家设想了微米级的机械设备,它们可以在人体内部穿过血管移动并进行手术,这造就了“吞咽外科医生”一词。
Microrollers(绿色)从其二氧化硅侧面与乳腺癌细胞(蓝色和红色)结合。
在过去的二十年中,由于微机的制造技术,所用材料,致动和成像方面的许多飞跃,研究领域得到了加速。
然而,当前人体内部的微型机器人主要限于表层组织(例如,眼睛内部),具有相对较容易进入路径的位置(例如,胃肠道)以及停滞或低速的流体环境。
为了到达体内更深的位置,尽管条件非常恶劣,也许仍然无法绕过循环系统。
科学家希望他们制定的受生物启发的策略将有助于为在高速血液循环系统中的微型机器人进行受控导航创造一个新的场所。流动条件。这将有可能为微型机器人针对性和局部性的治疗传递铺平道路。